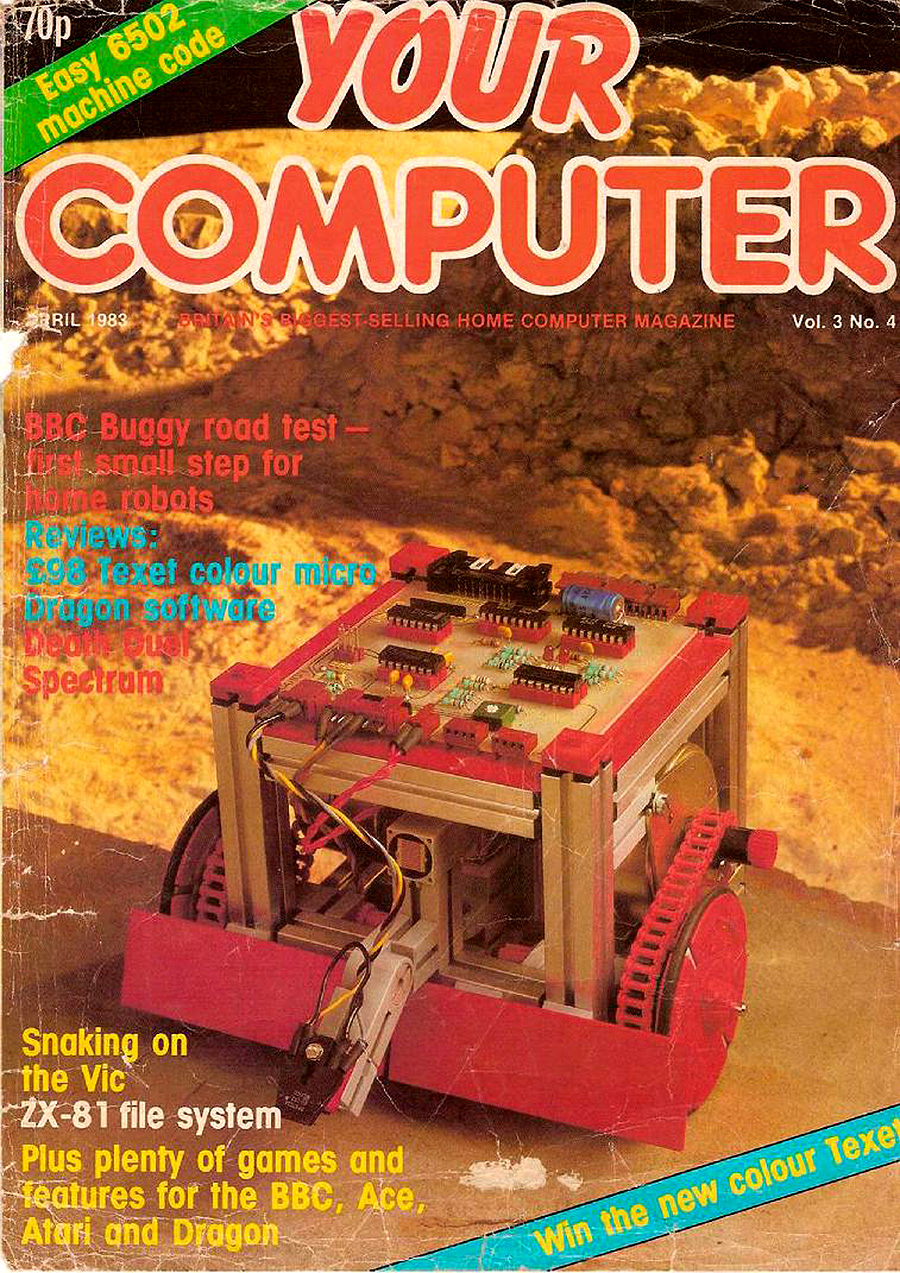
Fischertechnik en computersoftware vormden een ideaal stel in de beginjaren van het computerhobbyisme. Veel natuurkundeleraren maakten van deze combinatie een interessante toevoeging voor menig schoolcurriculum en de BBC Buggy (met software-op-audiocassette voor de Acorn BBC Micro computer) vormde hiervan een absoluut hoogtepunt. Fotogeniek en veelbelovend, de kit werd duizenden keren verkocht en nog vaker als hoofdrolspeler in een boek of tijdschrift afgebeeld.
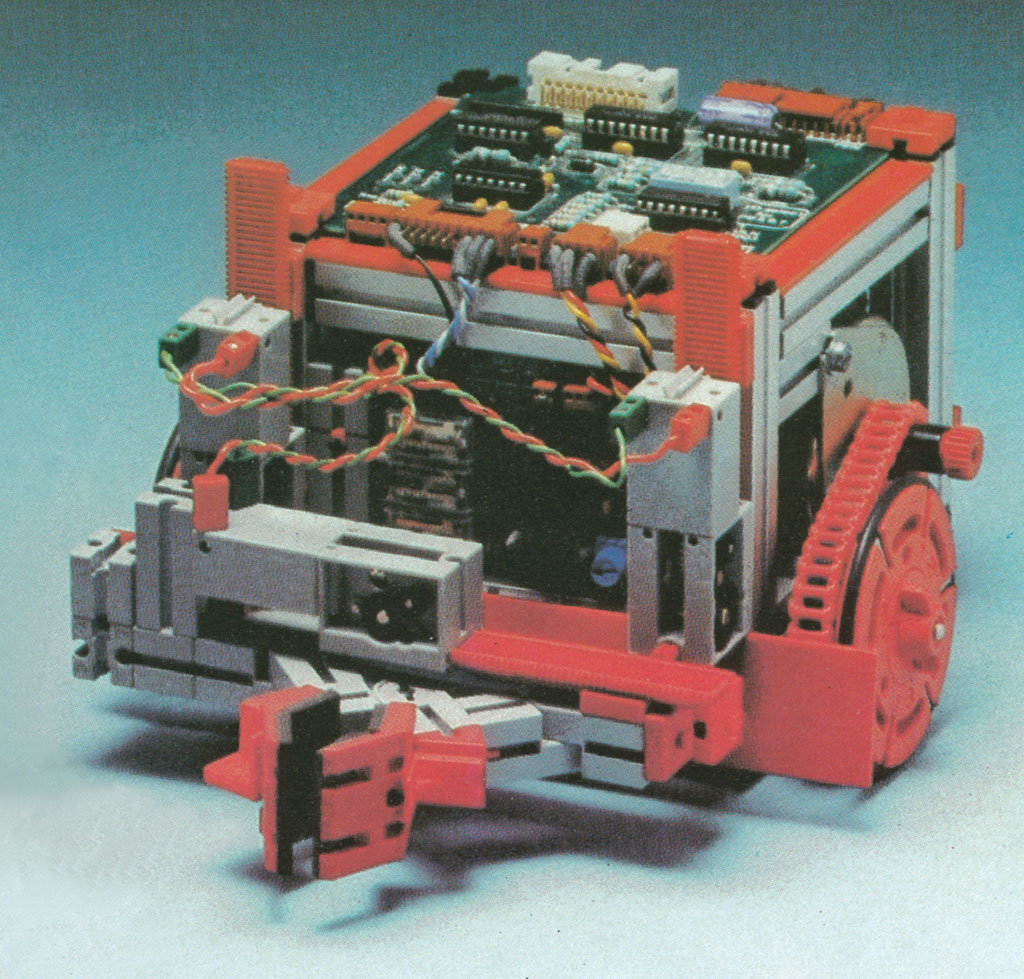
De BBC Buggy was een bouwpakket dat bestond uit diverse Fischertechniek-onderdelen, stappenmotoren, een aansturingsprintplaat en een lang eind flatcable. De aansturing kon in principe met de meeste van de in die tijd beschikbare home computers, hoewel de meegeleverde handleiding en software bedoeld was voor de populaire (want in een BBC televisieprogramma gebruikte) Acorn BBC Micro computer.
Het aansturen van ‘hardware’ vanuit een computer had een hoog experimenteergehalte in de jaren ’80 en de experimenten waren niet geheel zonder risico voor de gebruikte computer. Interfaceboards met optische scheiding tussen de elektrische circuits van computer en aangesloten hardware waren een must. De kit van Economatics voorzag hierin, en de aansluiting tussen de BBC Buggy en computer werd met een lange, flexibele regenboogkabel uitgevoerd. De onderdelen van de bouwdoos moesten aan de hand van de meegeleverde handleiding met een schroevendraaier en een mini dopsleuteltje in elkaar worden gezet, hetgeen voor de gebruiker al gelijk een flinke dosis voorpret betekende. De software hielp met testen of de kit goed was geassembleerd en verschillende programma’s lieten het karretje met de toetsen van de computer besturen. De magie van het aansturen van hardware met een computer was veelsprekend, ook als was het ook voor het ongeoefende oog duidelijk te zien hoe de techniek in elkaar zat.