Een gemiddelde huisvlieg (musca domestica) is door de bank genomen aanmerkelijk succesvoller in overleven en voortplanten dan een high-end grasmaai-robot.
Het is onwaarschijnlijk dat een huisvlieg een 3-dimensionaal beeld ontwikkelt met beschrijvingen van alle voorwerpen in vliegbereik. Evenmin is het waarschijnlijk dat een huisvlieg zich afvraagt of een mens met een muggenklapper gevaar voor zijn voortbestaan oplevert, gegeven die mens z’n overtuigingen ten aanzien van huisvliegen, doelen en plannen. Ook lijkt het niet waarschijnlijk dat een vlieg filosofische discussies met zichzelf voert over de geschiktheid van het ene dode dier boven het andere voor het leggen van eieren. Of een fysiek model voor het landen op plafonds beschikbaar heeft.
Het is daarentegen wel heel waarschijnlijk dat een huisvlieg sensoren heeft die vrij direct verbonden zijn met zijn actuatoren (vleugels, poten). Ook het gedrag van een vlieg zou heel goed ‘hardgecodeerd’ kunnen zijn. Navigatie van een huisvlieg zou wel eens een heel simpel terugkoppelingsmechanisme kunnen zijn. En in het geheel genomen zou zo’n huisvlieg wel eens een doelgerichte machine kunnen zijn. Feit is, dat een huisvlieg een aantal factoren succesvoller in de buitenwereld is dan onze pogingen om kunstmatige intelligentie buiten te laten overleven. Hoe komt dat?
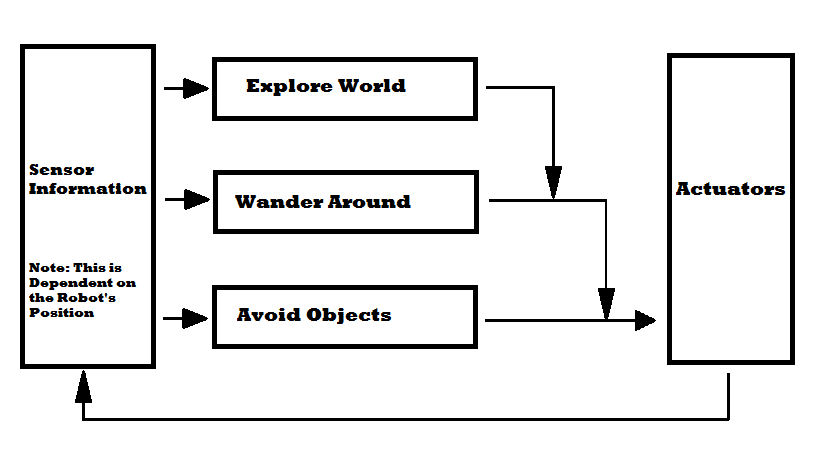
Rodney Brooks, professor aan het Massachusetts Institute of Technology, ontwikkelde in 1986 de subsumption architectuur: een schaalbaar algoritme dat een eenvoudige koppeling tussen sensoren en actuatoren teweeg brengt, maar de ruimte geeft om met een gelaagdheid van koppelingen complex gedrag te beschrijven en te programmeren. Zelf heb ik dit algoritme gebruikt in mijn eigen mobile robot toelatingsexamen (gebaseerd op de subsumption architectuur die door Jones en Flynn werd beschreven) en mijn latere Lego BASIC buggy.
Brooks is mede-oprichter van iRobot en het eerste product, Roomba, was voorzien van deze subsumption architectuur. Hierdoor kon de robot succesvol door willekeurige ruimtes navigeren, stofzuigen en toch nooit vastlopen. De subsumption architectuur is een belangrijke ontwikkeling geweest voor de huidige generatie zelfrijdende auto’s.